Transzformációk#
Ebben a fejezetben megismerkedünk, hogyan tudunk geometriai alakzatokat forgatni síkon és térben.
Geometria reprezentálása#
import numpy as np
import matplotlib.pyplot as plt
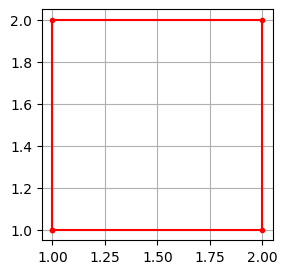
Első lépésként meg kell határoznunk, hogy tudjuk reprezentálni alakzatokat. Síkon először a pontok koordinátáit gyűjtük egy \(n \times 2\)-es tömbbe adjuk meg, tehát a pontok koordinátái sorokba vannak rendezve:
pt = np.array([[1, 1], [2, 1], [2, 2], [1, 2], [1, 1]])
Ezután a pontokat egyszerűen ki tudjuk rajzolni:
plt.figure(figsize=(3, 3))
plt.plot(pt[:, 0], pt[:, 1], 'r.-')
plt.grid()
plt.gca().set_aspect('equal')
Figyelem
A pontok sorrendjére oda kell ügyelnünk, ugyanis a pontok a sorok sorrendjébe lesznek összekötve. Például próbáljuk ki, hogy nézz ki az alakzat, ha a második és harmadik pontot felcseréljük a fenti példában:
pt = np.array([[1, 1], [2, 2], [2, 1], [1, 2], [1, 1]])
plt.figure(figsize=(3, 3))
plt.scatter(pt[:, 0], pt[:, 1])
plt.plot(pt[:, 0], pt[:, 1])
Tipp
Ökölszabályként a pontokat órajárásval megegyező vagy ellentétes módon adjuk meg.
Figyelem
A pontok tömbjének az utolsó eleme a pont listának az első elemének kell lennie ahhoz, hogy az utolsó pont az első ponttal is össze legyen kötve, és így négyzetet kapjunk.
Ha a pontok összekötése a pontok sorrendjében történik, akkor a pontok sorrendjének megváltoztatásával azt meg tudjuk változtatni. Ehhez használhatunk egy index listát. Például a második és harmadik pont sorrendje az alábbi módon megváltoztatható:
pt = np.array([[1, 1], [2, 1], [2, 2], [1, 2], [1, 1]])
print('Eredeti lista:\n', pt)
idx = [0, 2, 1, 3, 4] # index lista
print('Megkevert lista:\n', pt[idx, :])
Eredeti lista:
[[1 1]
[2 1]
[2 2]
[1 2]
[1 1]]
Megkevert lista:
[[1 1]
[2 2]
[2 1]
[1 2]
[1 1]]
Az index lista használatával elkerülhető az első elem ismétlése az utolsó helyen:
pt = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
plt.figure(figsize=(3, 3))
plt.plot(pt[idx, 0], pt[idx, 1], 'r.-')
plt.grid()
plt.gca().set_aspect('equal')
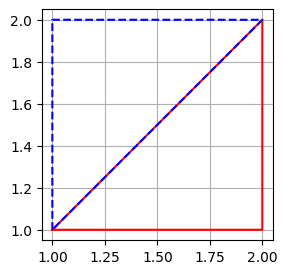
Ezzel ugyanazt az ábrát kaptuk, mint korábban. Vegyük észre, hogy a pt egy pontokat tartalmazó tömb, és az idx index lista adja meg a négyszöget alakját. Ezzel szétválasztottuk, a geometriát (pontok) és az azok közötti kapcsolatot leíró topológiát. Hasonló módon léterhozhatóak komplexebb alakzatok. Például az előbbi pontokat használva megadhatunk két háromszöget:
pt = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
tri1 = [0, 1, 2, 0]
tri2 = [0, 3, 2, 0]
plt.figure(figsize=(3, 3))
plt.plot(pt[tri1, 0], pt[tri1, 1], 'r-')
plt.plot(pt[tri2, 0], pt[tri2, 1], 'b--')
plt.grid()
plt.gca().set_aspect('equal')
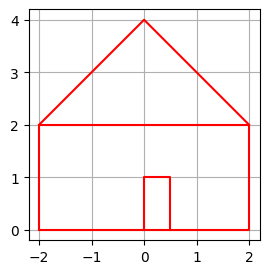
Az alábbi példában kirajzolunk egy házikót:
pt = np.array([[-2, 0], # 0
[2, 0], # 1
[2, 2], # 2
[-2, 2], # 3
[0, 4], # 4
[0, 0], # 5
[0, 1], # 6
[0.5, 1],# 7
[0.5, 0] # 8
])
walls = [0, 1, 2, 3, 0]
roof = [3, 4, 2]
door = [5, 6, 7, 8]
plt.figure(figsize=(3, 3))
plt.plot(pt[walls, 0], pt[walls, 1], 'r-')
plt.plot(pt[roof, 0], pt[roof, 1], 'r-')
plt.plot(pt[door, 0], pt[door, 1], 'r-')
plt.grid()
plt.gca().set_aspect('equal')
Transzformációk síkon#
Eltolás#
Egy \(p \in \mathbb{R}^2\) pontot az alábbi módon tudunk eltolni:
\(q = p + t\),
ahol \(t \in \mathbb{R}^2\) az eltolás vektora.
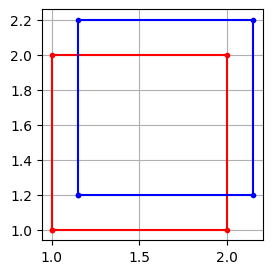
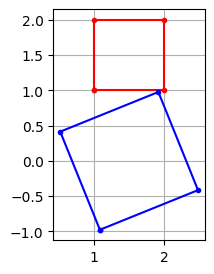
Toljuk el a korábbi négyszöget 0.15-tel az X és 0.2-vel az Y tengelyek irányában:
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
t = [0.15, 0.2]
q = p + t
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q[idx, 0], q[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
Skálázás#
Egy \(p \in \mathbb{R}^2\) pontot az alábbi módon tudunk nagyítani, vagy kicsinyíteni:
\(q = st\),
ahol \(s \in \mathbb{R}\) egy szám mely a nagyítás vagy kicsinyítés méretét adja meg. Ha \(0 < s <1\) akkor kicsinyítést, ha \(1 < s\) akkor nagyítást végzünk.
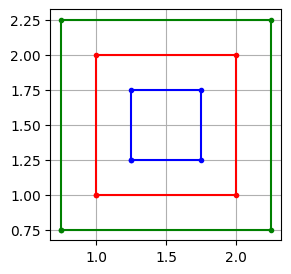
Az alábbi példában a négyszöget 1.5-szeresére nagyítjuk és 0.5-szeresére kicsinyítjük:
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
q_small = 1.5*p
q_big = 0.5*p
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q_small[idx, 0], q_small[idx, 1], 'g.-')
plt.plot(q_big[idx, 0], q_big[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
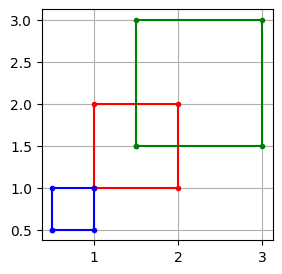
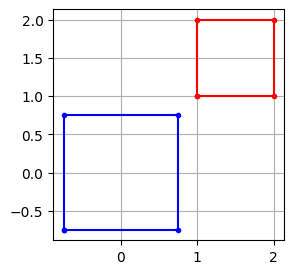
Vegyük észre, hogy a méretarány változtatás nem a négyszög középpontjában történt. Ha a nagyítást vagy kicsinyítést az alakzat középpontában szeretnénk elvégezni, akkor három lépést kell elvégezni:
Az alakzatot az origóba kell tolnunk a súlypont koordinátáinak segítségével,
Majd a skálázást végre kell hajtatnunk,
Végül a kapott pontokat vissza kell tolnunk az eredeti súlypontba.
Végezzük el ezeket a lépéseket külön-külön és nézzük meg mik az éppen aktuális pontok koordinátái.
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
t = np.mean(p, axis=0)
q = p - t
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q[idx, 0], q[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
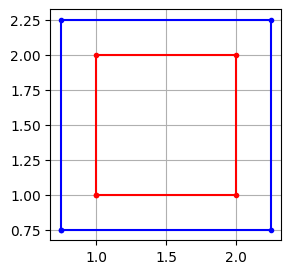
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
t = np.mean(p, axis=0)
q = 1.5 * (p - t)
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q[idx, 0], q[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
t = np.mean(p, axis=0) # Súlypont koordinátái
q = 1.5 * (p - t) + t
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q[idx, 0], q[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
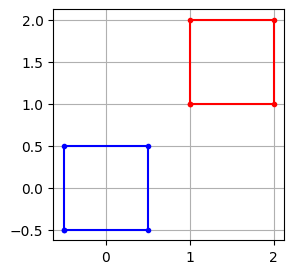
Végül kicsinyítés és nagyítás a sólypont körül:
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
t = np.mean(p, axis=0)
q_small = 1.5*(p - t) + t
q_big = 0.5*(p - t) + t
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q_small[idx, 0], q_small[idx, 1], 'g.-')
plt.plot(q_big[idx, 0], q_big[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
Forgatás#
from math import sin, cos
alpha = np.deg2rad(22.5) # = / 180.0 * math.pi
R = np.array([[cos(alpha), -sin(alpha)], [sin(alpha), cos(alpha)]])
print(R)
[[ 0.92387953 -0.38268343]
[ 0.38268343 0.92387953]]
p = np.array([0, 1])
q = R @ p
print(q)
[-0.38268343 0.92387953]
plt.figure(figsize=(3, 3))
plt.plot(0, 0, '.')
plt.plot(p[0], p[1], 'r.')
plt.plot(q[0], q[1], 'g.')
plt.grid()
plt.gca().set_aspect('equal')
A forgatási mátrix úgynevezett ortonormált mátrix. Ez azt jelenti, hogy a mátrix transzponáljta megegyezik az inverzével:
np.linalg.inv(R) - R.T
array([[0.00000000e+00, 5.55111512e-17],
[0.00000000e+00, 0.00000000e+00]])
Használjatuk a mátrix normát, hogy ellenőrizzük, hogy két mátrix megegyezik:
np.linalg.norm(np.linalg.inv(R) - R.T)
5.551115123125783e-17
Azon kívül hogy, a forgatási mátrix transzponáltja megegyezik inverzével, az ortonormáltság azt is jelenti, hogy a forgatási mátrix determinánsa 1:
np.linalg.det(R)
1.0
Következmény, hogy a forgatási mátrix önmagával vett inverze az egységmátrix:
np.linalg.inv(R) @ R
array([[ 1.00000000e+00, 2.96506192e-17],
[-2.16349973e-17, 1.00000000e+00]])
Nyilvánvalóan ez igaz a transzponáltra is:
R.T @ R
array([[ 1.00000000e+00, -2.16349973e-17],
[-2.16349973e-17, 1.00000000e+00]])
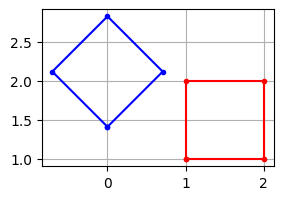
Ezek után alkalmazzuk a forgatást a a négyszögre (figyeljünk oda a pont mátrixok és a forgatási mátrix méreteire):
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
alpha = np.deg2rad(45)
R = np.array([[cos(alpha), -sin(alpha)], [sin(alpha), cos(alpha)]])
q = (R @ p.T).T
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q[idx, 0], q[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
Vizsgáljuk meg a q = (R @ p.T).T műveletet és a vektorok és mátrixok alakját:
print(p.shape)
print(p.T.shape)
print((R @ p.T).shape)
print((R @ p.T).T.shape)
(4, 2)
(2, 4)
(2, 4)
(4, 2)
A műveletek végén a transzformált pontoknak sorokba kell rendezve lennie.
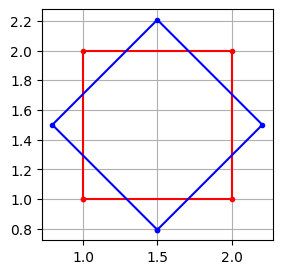
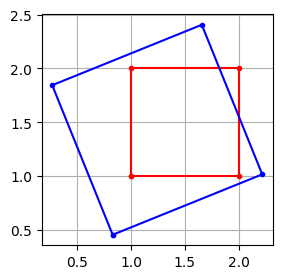
Vegyük észre a fenti példában a forgatás nem a négyszög súlypontja körül történt. A súlypont körüli forgatáshoz a skálázáshoz hasonlóan kell eljárnunk: a pontokat az origóba toljuk, ott a forgatást elvégezzük, majd vissze toljuk az alakzatot az eredeti súlypontba.
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
alpha = np.deg2rad(45)
R = np.array([[cos(alpha), -sin(alpha)], [sin(alpha), cos(alpha)]])
t = np.mean(p, axis=0)
q = (R @ (p - t).T).T + t
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q[idx, 0], q[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
Összetett transzformációk homogén koordinátákkal#
Nagyítsuk az alakzatot 1.5-szeresére a saját súlypontjából nézve, ls forgassuk el 22 fokkal, majd toljuk el az alakzatot -1.5 egységgel az Y tengely mentén:
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
idx = [0, 1, 2, 3, 0]
alpha = np.deg2rad(22)
R = np.array([[cos(alpha), -sin(alpha)], [sin(alpha), cos(alpha)]])
t = np.mean(p, axis=0)
q = (1.5 * R @ (p - t).T).T + t + [0, -1.5]
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q[idx, 0], q[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
A pontok homogén koordinátáit úgy kapjuk, hogy eggyel megnöveljük a pontok dimenzióját, és a megnövelt dimenzió helyére 1-t írunk:
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
p_ = np.hstack((p, np.ones((p.shape[0], 1))))
print(p_)
[[1. 1. 1.]
[2. 1. 1.]
[2. 2. 1.]
[1. 2. 1.]]
Írjuk fel a fenti transzformációkat homogén koordinátákkal és transzformációkkal:
p = np.array([[1, 1], [2, 1], [2, 2], [1, 2]])
p_ = np.hstack((p, np.ones((p.shape[0], 1))))
idx = [0, 1, 2, 3, 0]
t = np.mean(p, axis=0)
T_ = np.array([[1, 0, t[0]],
[0, 1, t[1]],
[0, 0, 1]])
T_inv_ = np.array([[1, 0, -t[0]],
[0, 1, -t[1]],
[0, 0, 1]])
alpha = np.deg2rad(22)
R = np.array([[cos(alpha), -sin(alpha)], [sin(alpha), cos(alpha)]])
R_ = np.array([[R[0, 0], R[0, 1], 0],
[R[1, 0], R[1, 1], 0],
[0, 0, 1]])
S_ = np.array([[1.5, 0, 0],
[0, 1.5, 0],
[0, 0, 1]])
K_ = np.array([[1, 0, 0],
[0, 1, -1.5],
[0, 0, 1]])
q_ = K_ @ T_ @ R_ @ S_ @ T_inv_ @ p_.T
q_ = q_.T
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q_[idx, 0], q[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
A fenti transzformációs mátrixok komponálása kompaktabb módon is elvégezhető:
p = np.array([[1, 1, 1], [2, 1, 1], [2, 2, 1], [1, 2, 1]])
idx = [0, 1, 2, 3, 0]
T_ = np.eye(3)
T_[:2, 2] = np.mean(p[:, :2], axis=0)
alpha = np.deg2rad(22)
R_ = np.eye(3)
R_[:2, :2] = np.array([[cos(alpha), -sin(alpha)], [sin(alpha), cos(alpha)]])
S = np.eye(3) * 1.5
S[2,2] = 1
K = np.eye(3)
K[1, 2] = -1.5
q_ = K @ T_ @ R_ @ S @ np.linalg.inv(T_) @ p.T
q_ = q_.T
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q_[idx, 0], q_[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
Helmert transzformáció#
A geodéziában gyakran előforduló egy ún. hétparaméteres vagy Helmert transzformáció mely megadható az alábbi alakban:
\( q = sRp + t \)
p = np.array([[1, 1, 1], [2, 1, 1], [2, 2, 1], [1, 2, 1]])
idx = [0, 1, 2, 3, 0]
alpha = np.deg2rad(22)
R_ = np.eye(3)
R_[:2, :2] = np.array([[cos(alpha), -sin(alpha)], [sin(alpha), cos(alpha)]])
S_ = np.eye(3) * 1.5
S_[2,2] = 1
K_ = np.eye(3)
K_[1, 2] = -1.5
q_ = K_ @ R_ @ S_ @ p.T
q_ = q_.T
plt.figure(figsize=(3, 3))
plt.plot(p[idx, 0], p[idx, 1], 'r.-')
plt.plot(q_[idx, 0], q_[idx, 1], 'b.-')
plt.grid()
plt.gca().set_aspect('equal')
Vegyük észre, hogy a forgatás és skálázás referencia pontja a koordinátarendszer origója. A Helmert transzformációt leíró homogén transzformációs mátrix:
H_ = K_ @ R_ @ S_
print(H_)
[[ 1.39077578 -0.56190989 0. ]
[ 0.56190989 1.39077578 -1.5 ]
[ 0. 0. 1. ]]
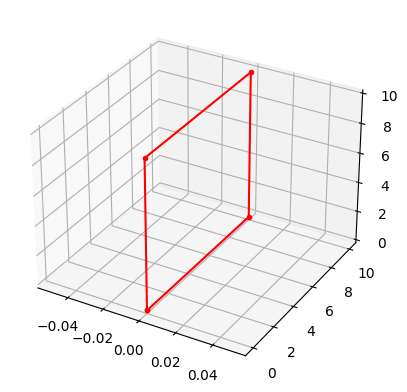
Transzformációk térben#
p = np.array([[0, 0, 0], [0, 0, 10], [0, 10, 10], [0, 10, 0], [0, 0, 0]])
ax = plt.figure().add_subplot(projection='3d')
ax.plot(p[:, 0], p[:, 1], p[:, 2], 'r.-')
[<mpl_toolkits.mplot3d.art3d.Line3D at 0x7fb39132c310>]
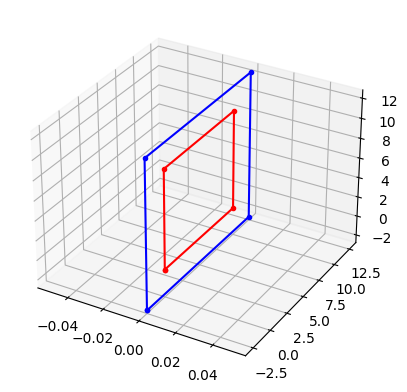
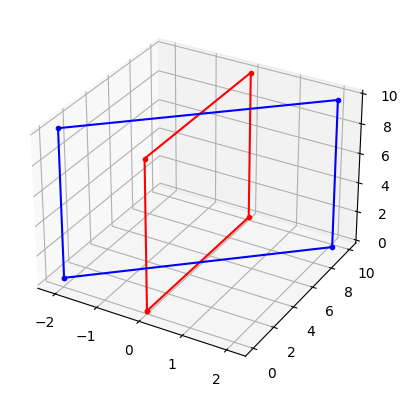
Eltolás és skálázás térben#
Az eltolást és skálázást ugyanolyan módon tudjuk elvégezni mint síkon, az egyetlen különbség, hogy 3D koordinátákkal dolgozunk. Nézzünk egy példát, hogyan tudjuk a 3D négyszöget másfelészeresére nagyítani saját súlypontjából nézve:
p = np.array([[0, 0, 0], [0, 0, 10], [0, 10, 10], [0, 10, 0]])
idx = [0, 1, 2, 3, 0]
t = np.mean(p, axis=0)
q = 1.5*(p - t) + t
ax = plt.figure().add_subplot(projection='3d')
ax.plot(p[idx, 0], p[idx, 1], p[idx, 2], 'r.-')
ax.plot(q[idx, 0], q[idx, 1], q[idx, 2], 'b.-')
[<mpl_toolkits.mplot3d.art3d.Line3D at 0x7fb3912469a0>]
Ezen transzformációk homogén koordinátákkal is leírhatóak a síkban bemutatott módon, a különbség, hogy a térbeli esetben a transzformációs mátrix \(4\times4\)-esek.
p = np.array([[0, 0, 0], [0, 0, 10], [0, 10, 10], [0, 10, 0]])
p_ = np.hstack((p, np.ones((p.shape[0], 1))))
idx = [0, 1, 2, 3, 0]
T_ = np.eye(4)
T_[:3, 3] = np.mean(p, axis=0)
S_ = np.eye(4)
S_[0, 0] = 1.5
S_[1, 1] = 1.5
S_[2, 2] = 1.5
q_ = T_ @ S_ @ np.linalg.inv(T_) @ p_.T
q_ = q_.T
ax = plt.figure().add_subplot(projection='3d')
ax.plot(p_[idx, 0], p_[idx, 1], p_[idx, 2], 'r.-')
ax.plot(q_[idx, 0], q_[idx, 1], q_[idx, 2], 'b.-')
[<mpl_toolkits.mplot3d.art3d.Line3D at 0x7fb39132ed90>]
Forgatások#
Kísérleti szögek teszteléshez:
euler_deg = [45, 15, -25]
yaw = euler_deg[0] / 180.0 * np.pi
pitch = euler_deg[1] / 180.0 * np.pi
roll = euler_deg[2] / 180.0 * np.pi
R_x = np.array([[1, 0, 0], [0, np.cos(yaw), -np.sin(yaw)], [0, np.sin(yaw), np.cos(yaw)]])
R_y = np.array([[np.cos(pitch), 0, np.sin(pitch)], [0, 1, 0], [-np.sin(pitch), 0, np.cos(pitch)]])
R_z = np.array([[np.cos(roll), -np.sin(roll), 0], [np.sin(roll), np.cos(roll), 0], [0, 0, 1]])
R = R_z @ R_y @ R_x
print(R)
[[ 0.8754261 0.46470208 -0.1329704 ]
[-0.40821789 0.56351187 -0.71820089]
[-0.25881905 0.6830127 0.6830127 ]]
A fenti forgatás megadható a scipy könyvtár Rotation osztályának segítségével:
from scipy.spatial.transform import Rotation
R = Rotation.from_euler('xyz', euler_deg, degrees=True)
print(R.as_matrix())
[[ 0.8754261 0.46470208 -0.1329704 ]
[-0.40821789 0.56351187 -0.71820089]
[-0.25881905 0.6830127 0.6830127 ]]
Forgassuk el a korábbi négyszöget 25 fokkal az órajárással megegyező irányban a Z tengely körül az alakzat súlypontja körül:
p = np.array([[0, 0, 0], [0, 0, 10], [0, 10, 10], [0, 10, 0]])
p_ = np.hstack((p, np.ones((p.shape[0], 1))))
idx = [0, 1, 2, 3, 0]
T_ = np.eye(4)
T_[:3, 3] = np.mean(p, axis=0)
euler_deg = [0, 0, -25]
R_ = np.eye(4)
R_[:3, :3] = Rotation.from_euler('xyz', euler_deg, degrees=True).as_matrix()
q_ = T_ @ R_ @ np.linalg.inv(T_) @ p_.T
q_ = q_.T
ax = plt.figure().add_subplot(projection='3d')
ax.plot(p_[idx, 0], p_[idx, 1], p_[idx, 2], 'r.-')
ax.plot(q_[idx, 0], q_[idx, 1], q_[idx, 2], 'b.-')
[<mpl_toolkits.mplot3d.art3d.Line3D at 0x7fb376c47c10>]
Belső és külső forgatások#
import numpy as np
import matplotlib.pyplot as plt
from scipy.spatial.transform import Rotation
# External imports
url = f"https://raw.githubusercontent.com/zkoppanyi/uni/main/utils/viz/viz.py"
!wget --no-cache --backups=1 {url}
from viz import plot_fustrum, plot_crs, set_3d_axes_equal
--2024-05-02 09:51:30-- https://raw.githubusercontent.com/zkoppanyi/uni/main/utils/viz/viz.py
Resolving raw.githubusercontent.com (raw.githubusercontent.com)... 185.199.109.133, 185.199.110.133, 185.199.111.133, ...
Connecting to raw.githubusercontent.com (raw.githubusercontent.com)|185.199.109.133|:443... connected.
HTTP request sent, awaiting response...
200 OK
Length: 2234 (2,2K) [text/plain]
Saving to: ‘viz.py’
viz.py 0%[ ] 0 --.-KB/s
viz.py 100%[===================>] 2,18K --.-KB/s in 0s
2024-05-02 09:51:30 (33,4 MB/s) - ‘viz.py’ saved [2234/2234]
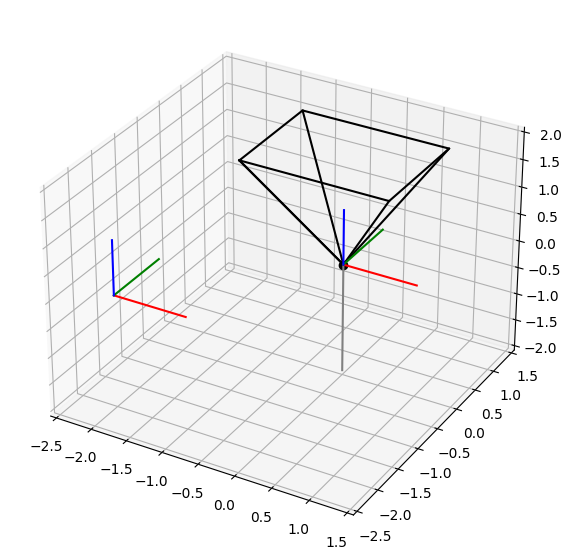
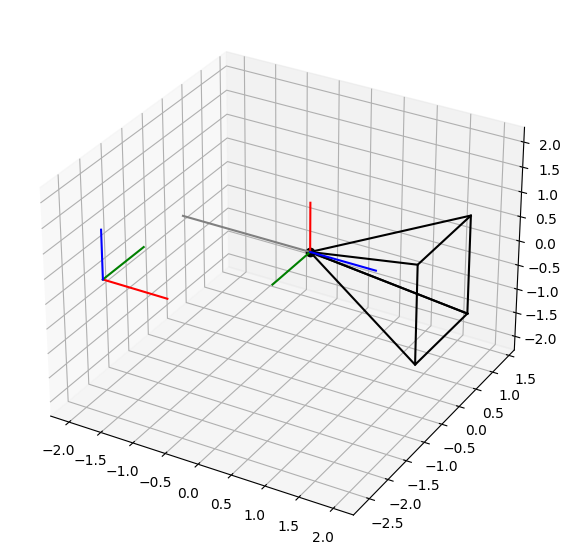
A következő függvény csinál nekünk grafikát, amiről értelmezni fogjuk a forgatásokat:
def plot_rotation(x, y, z, intrinsic=True):
plt.figure(figsize=(9,7))
ax = plt.axes(projection='3d')
if intrinsic:
R = Rotation.from_euler('XYZ', [x, y, z], degrees=True)
else:
R = Rotation.from_euler('xyz', [x, y, z], degrees=True)
plot_fustrum(ax, [0, 0, 0], R.as_matrix(), img_limits=[1, 0.75], f=2.0, scale=1.0, c='k')
plot_crs(ax, np.eye(3), X=[-2, -2, 0])
crs = R.as_matrix().T
plot_crs(ax, crs)
set_3d_axes_equal(ax)
A grafika így nézz ki:
pirossal az X tengelyt,
zölddel az Y tengelyt, és
kékkel a Z tengelyt láthatjuk.
plot_rotation(0, 0, 0)
Forgatás az X tengely körül (piros tengely):
plot_rotation(90, 0, 0)
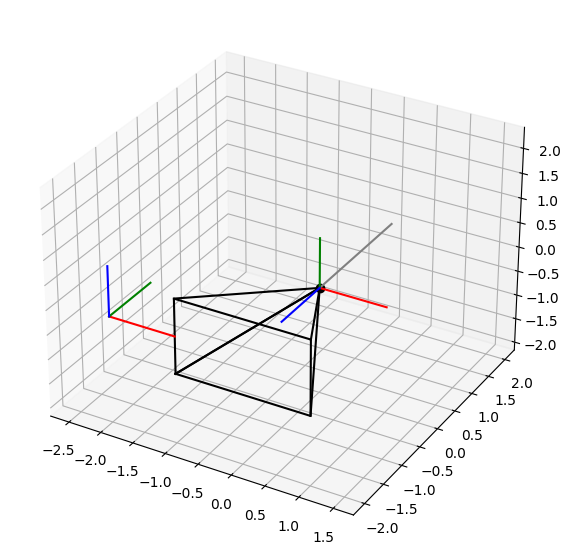
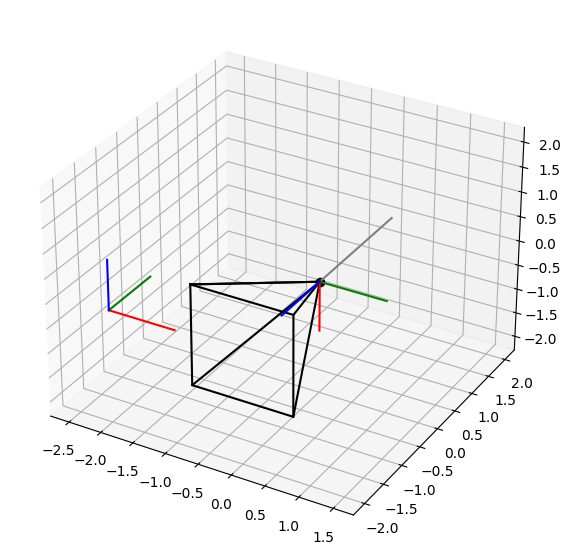
Forgatás az Y tengely körül az elforgatott koordináta rendszerben. Vegyük észre ez egy forgatás az X világbeli koordinátarendszerben.
plot_rotation(90, 90, 0)
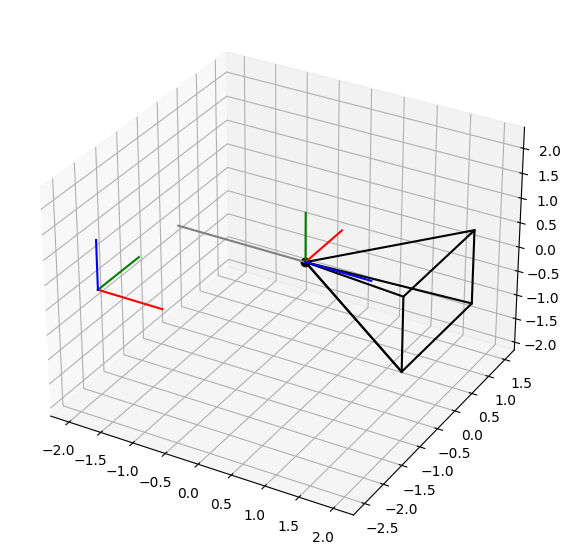
Forgatás az Z tengely körül az elforgatott koordináta rendszerben. Ez egy forgatás az X világbeli koordinátarendszerben.
plot_rotation(90, 90, 90)
Magyarázat:
12 kombinációja van x, y, z tengelyek körüli forgatásnak:
Mechatronikában használatos: z-x-z, x-y-x, y-z-y, z-y-z, x-z-x, y-x-y
Navgiációban, fotogrammetriában használatos: x-y-z, y-z-x, z-x-y, x-z-y, z-y-x, y-x-z
További információ: https://en.wikipedia.org/wiki/Euler_angles#Definition_by_intrinsic_rotations
Oké, most nézzük meg ugyanezeket a forgatások külső forgatásoként.
Első forgatás az X tengely körül ugyanúgy nézz ki.
plot_rotation(90, 0, 0, intrinsic=False)
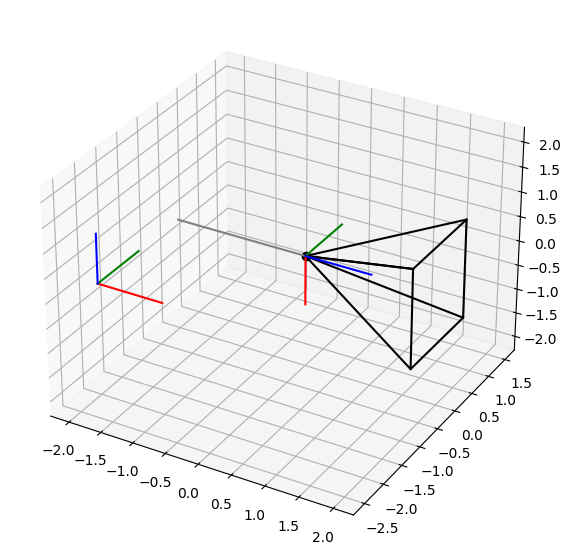
Vegyük észre, hogy a második forgatás viszont a világbeli Y tengely körül történik most.
plot_rotation(90, 90, 0, intrinsic=False)
Ugyanígy a harmadik is.
plot_rotation(90, 90, 90, intrinsic=False)
Tehát van 12 forgatás kombinációnk belső, illetve 12 forgatási kombinációnk külső forgatásokra. Ez összesen 24 különböző módja a forgatások definiálásának. Azonban ezek a forgatások nyilvánvalóan átfednek. Ennek módját a következő lemma adja meg.
Lemma: Egy Euler szögekkel adott belső forgatások ugyanazt a forgatást írják le, mint az ugyanazokkal a szögekkel megadott külső forgatások fordított sorrendje.
Ezt az ekvivalenciát deomnstrálja a következő kód.
# Test angle
rpy = euler_deg
# Rotation matrix from extrinsic rotations
R_int = Rotation.from_euler('xyz', rpy, degrees=True) # extrinsic
# Reverse the order of the input Euler angles
ypr = [euler_deg[2], euler_deg[1], euler_deg[0]]
# Rotation matrix from intrinsic rotations of the reversed angle
R_ext = Rotation.from_euler('ZYX', ypr, degrees=True) # intrinsic
# Check whether the two are the same.
chk = np.linalg.norm(R_int.as_matrix() - R_ext.as_matrix())
print(f"Difference of the two matrices: {chk}") # has to be small...
Difference of the two matrices: 0.0